Hi,
I’ve been using a Spartan 3 v2 (bought with an LSU 4.9) with a Link ECU over CAN on my Toyota GT86 for a while now.
Everything configured as per the online instructions and working perfectly for many months.
Recently I bought an LSU ADV to try the upgrade (and keep the LSU 4.9 as spare) and after installing and configuring, I noticed a problem: the lambda value transmitted over CAN now sticks for a brief moment (several seconds some times) at apparently random times (but always close to 1.0) and it’s enough to affect my closed loop lambda control with the engine oscillating and even stalling at times.
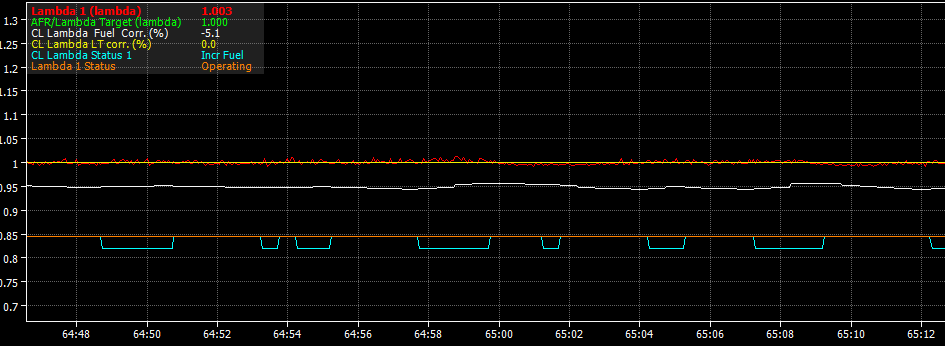
This is before the problem appeared:
(forum won’t let me post two embedded pictures ![]() )
)
Very stable AFR with a smooth CL control and uniterrupted lambda value
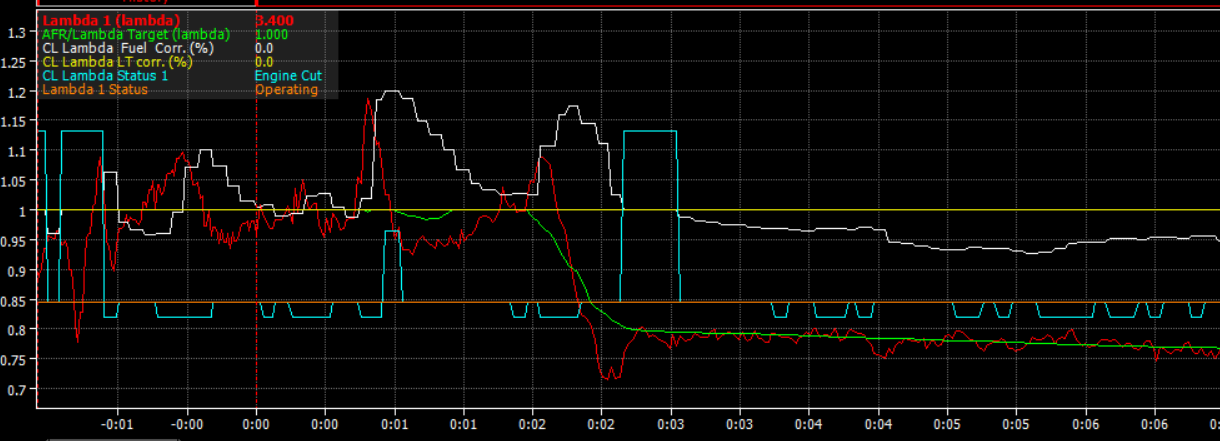
This is after the problem appeared:
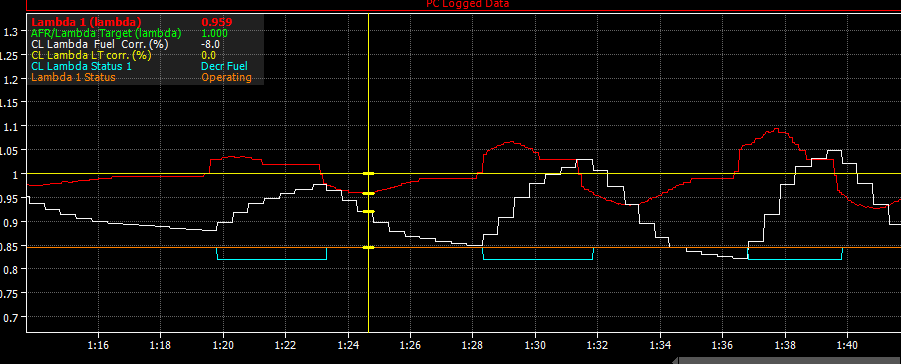
Lambda sticks at fixed value for up to 3 s and of course CL control overshoots and when lambda “unsticks” all hell breaks loose.
The CAN hardware and software configuration is exactly the same. The car did sit stored for a few months though until I topped up the battery and fired up the engine again.
Spartan firmware is v1.10. I have tried to go back to the LSU 4.9 and update the configuration but the problem is still there. Also tried a couple of changes in CAN configuration, resistors, etc but it’s all the same.
Is my Spartan dead? Any test I can make (such us get a direct lambda reading over USB to see if it sticks?
Regards,
Eduardo